Fanuc Ireland to debut at trade show as platinum sponsor
Fanuc Ireland is set to make its trade show debut this November, as platinum sponsor of the National Manufacturing & Supply Chain Conference & Exhibition.


In this Q&A session with Ed Hill, Professor Dragos Axinte from the University of Nottingham Rolls-Royce University Technology Centre, discusses the development of robotics to remotely repair jet engines.
The maintenance and overhaul of aero-engines while on the wing inevitably leads to delays and capacity problems for airlines while highly skilled engineers are drafted in to carry out repairs. Researchers at the University of Nottingham, led by Professor of Manufacturing Engineering Dragos Axinte, have been exploring how bespoke robotics could provide a more efficient solution.
Q) Firstly, can you explain why there is a need to develop a robotic system of aero-engine maintenance?
There are multiple benefits in performing robotic maintenance and repair of aero-engines while on the wing, i.e. without removing them from the wing of the plane. Firstly, the disruption to the airlines is minimised with immediate positive impact on the customer satisfaction. Then, there is also the benefit to the aero-engine manufacturers such as Rolls-Royce, which provide a service under the scheme ‘power by the hour’. Conventionally, these on-wing engine repairs are performed by highly-skilled engineers who need to be deployed to the places of intervention in minimum time. As such, would it not be better to have a robot on an intervention site and remotely operate it from a central expert hub where the highly-skilled engineer will command the necessary tasks without the need of local deployment? Moreover, robotic systems are capable to yield repeatable and high-precision tasks. You could call it (teleoperated) industrial surgery.
Q) How are you working to develop end effectors/tools etc. that are able to carry out the complex tasks needed for maintenance?
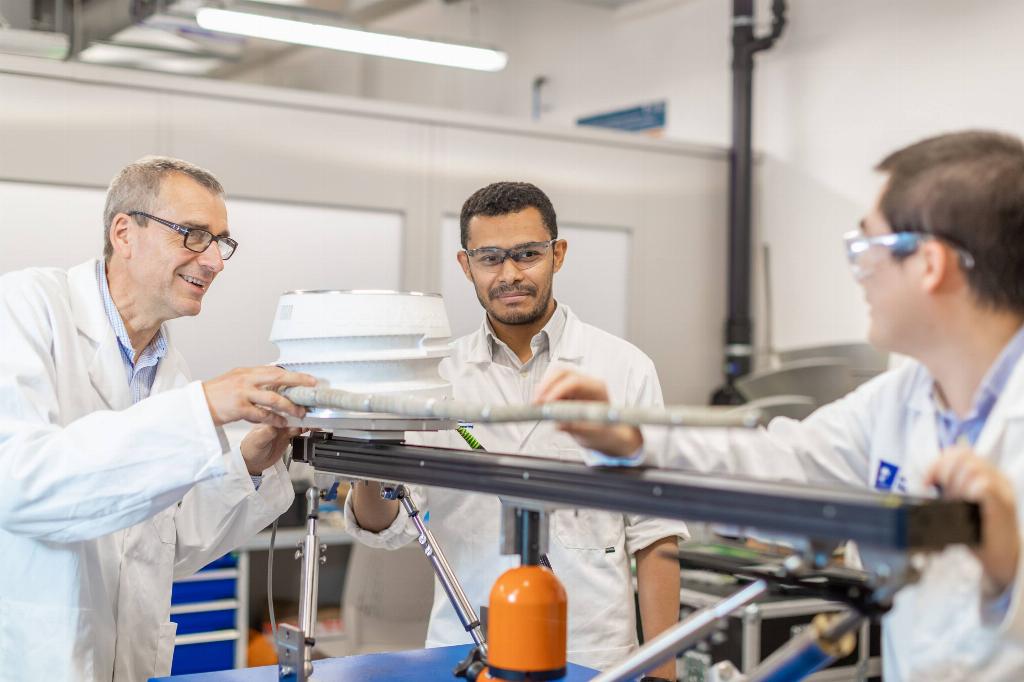
Firstly, aero-engines have small diameter ports placed at intervals along their length. Through these ports we can insert probes manipulated by our in-house developed robots. In general terms they replicate the movements that a skilled engineer would require to perform particular tasks using manual power tools. Secondly, we employ miniature end-effectors that aim to remove (e.g. small grinding spindles) or add/deposit (e.g. flame spraying nozzles) material, which being embedded in our robots can make repairs of engines while on-wing. At the moment we are exploring the expansion of our miniaturised end-effectors to deploy other repair/maintenance tasks in a “robotic industrial surgery” approach.
Q) What sort of vision systems are you employing to give as real an image as possible for the engineer back at the master station, and how do you give the robot the sense of ‘touch and feel’ needed to carry out servicing?
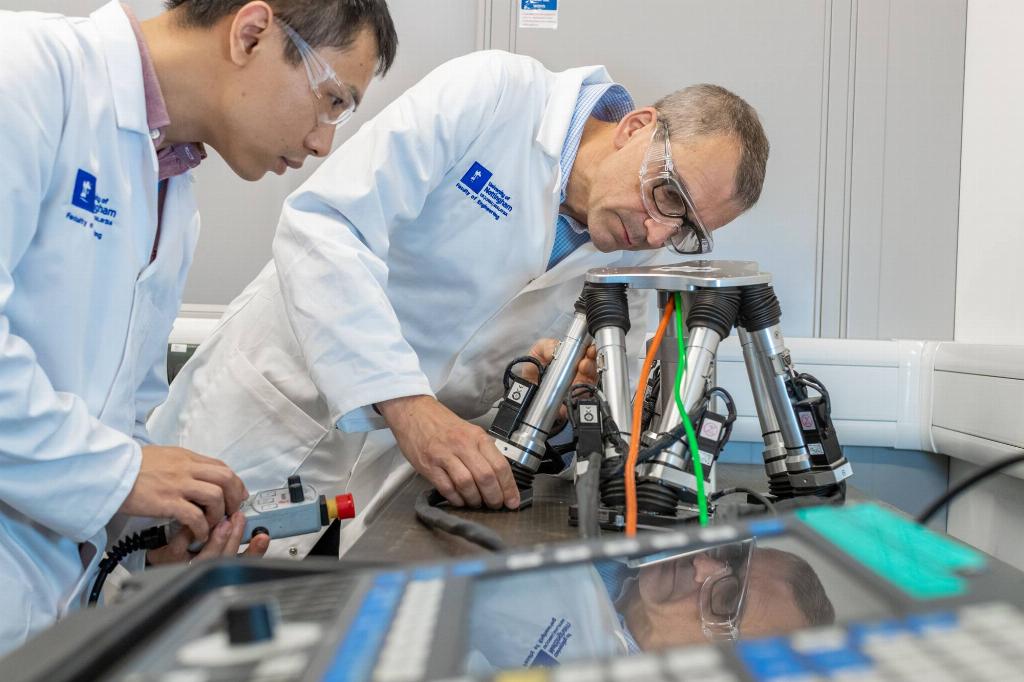
Our teleoperated robot is combining the CAD model of the environment on which it is operating with information from 3D cameras to identify and evaluate the level of repair to be carried out. Then, the robot end-effector (equipped with force sensors) positions itself against the job and repair tasks (e.g. tool passes) are carried out while at intervals precise measurements are performed to ensure the necessary accuracy of the repairs. All these commands to the robot are remotely done by an operator via secure internet protocols; of course, to avoid the latencies in data transmission, we sent packages of commands at intervals and execute them successively while allowing intermittent inspections/measurements of the performed jobs.
Q) Will the future designs of engines need to incorporate the use of robots for the maintenance?
That is not for us as researchers to decide; we are having real fun in identifying solutions for bespoke robotics. However, this might be the course of action in the future. Either the designers will need to consider in their engineering concepts the necessary accessibility to perform in-situ repairs with robotic systems or, more futuristic, will need to allow spaces for having in-built devices that can be activated when repairs and maintenance tasks are necessary.
Q) Could this robotic technology be tied in with additive manufacturing to make parts remotely and can it be developed for other aircraft systems?
Our robots have, in theory, the ability to carry any end-effectors (from inspection tools, to material removal and addition), provided they can be miniaturised to allow the necessary access through the access ports. For example, we already worked with Rolls-Royce and Metallisation, an SME specialised on coating technology, on an Innovate UK project (FLARE) on which we developed two continuum robots that work cooperatively to make in-situ repair of thermo-barrier coatings for aero-engines. Hence, we have already started to work on this topic but there are still challenges to be tackled to achieve the level of complexity you suggest here.
Q) Eventually, do you think it possible that these robots with AI capabilities could have a degree of autonomy?
Theoretically this could be possible for other industrial applications, but considering the strict quality standards governing the industry, by my understanding, there is a long way to follow this approach. I think teleoperated in-situ robotic repair will be the state-of-the-art for the near future on these kinds of applications.
Q) How are you working with industry partners, both OEMs and airlines, on developing this technology?
At the moment the strategic industrial partner is Rolls-Royce and we work under the umbrella of the Rolls-Royce University Technology Centre on Manufacturing and On-Wing Technology at University of Nottingham. However, we are working with significant number of UK and international companies to equip our robots with enabling facilities (e.g. vision and sensing systems, secure internet communication) as well as bespoke end-effectors (e.g. miniature spraying nozzles for coating repairs, miniature laser scanners). Based on the achievements of our slender continuum robots, we have attracted interest from a leading aircraft manufacturer for development of bespoke robots to address their maintenance needs. However, we have received strong interest from end-users outside aerospace industries such as oil & gas, petrochemical, nuclear and telecommunication and even disaster rescue teams.
Q) Do you anticipate this will become common practice and what sort of timescales are you expecting? Could it be adapted for other industries?
As a researcher, I would like to see our work and approaches adopted as standards in industry. However, I can imagine that this technology will become more common for end-users in 5-7 years. Nevertheless, it is the industry to get excited and to drive the translation of this technology to the level of becoming a norm.
Here at the University of Nottingham, we are open to be presented with new challenges for developing bespoke robotics. So, any industry looking for a research group to collaborate with for tacking challenging difficult in-situ repair tasks using bespoke robotics, should seek out the University of Nottingham.








